
Real-Time SO-ARM 101 ROS2 Teleoperation in Isaac Sim with LeRobot
December 7, 2025
Building a real-time teleoperation bridge between the SO-ARM 101 robotic arm and NVIDIA Isaac Sim using LeRobot and ROS2.
Exploring robotics, AI, and the technologies that bring them together.
Building a real-time teleoperation bridge between the SO-ARM 101 robotic arm and NVIDIA Isaac Sim using LeRobot and ROS2.
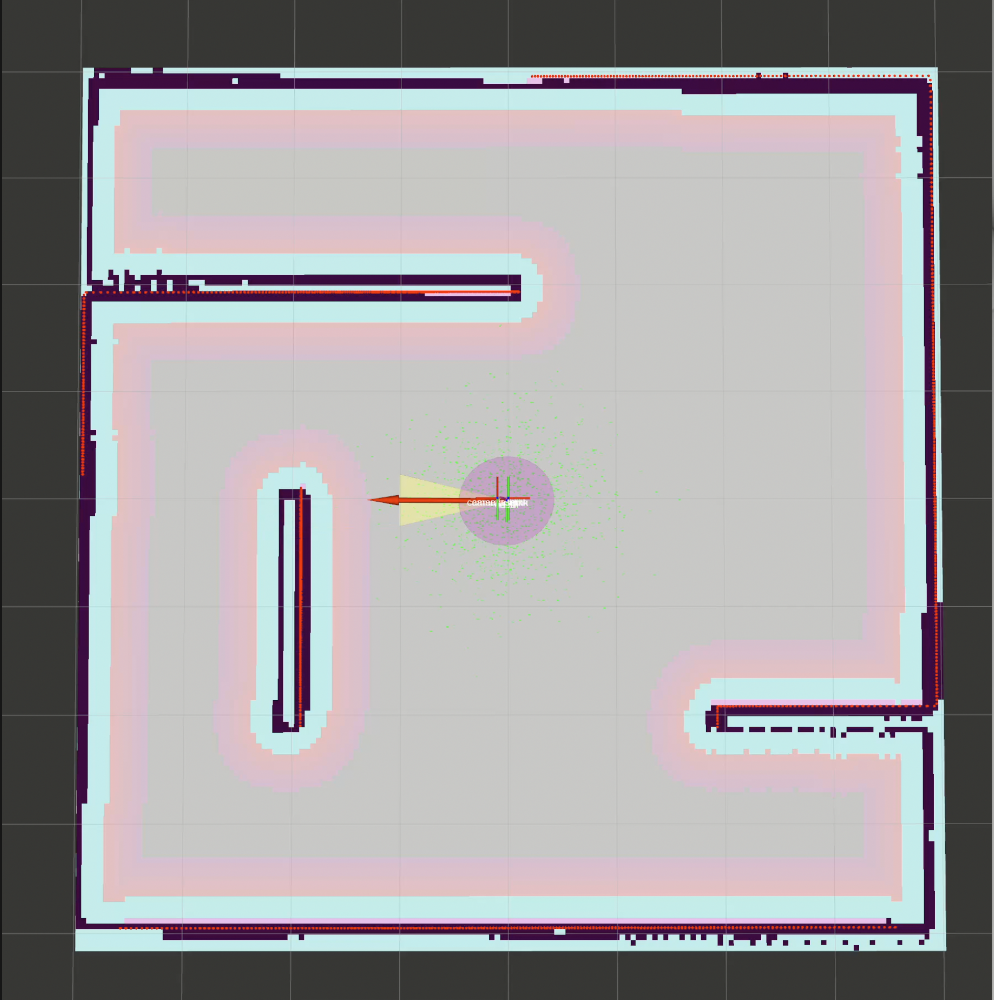
Bringing it all together - autonomous waypoint navigation using ROS2 Nav2 with SLAM maps and RL-trained velocity control.
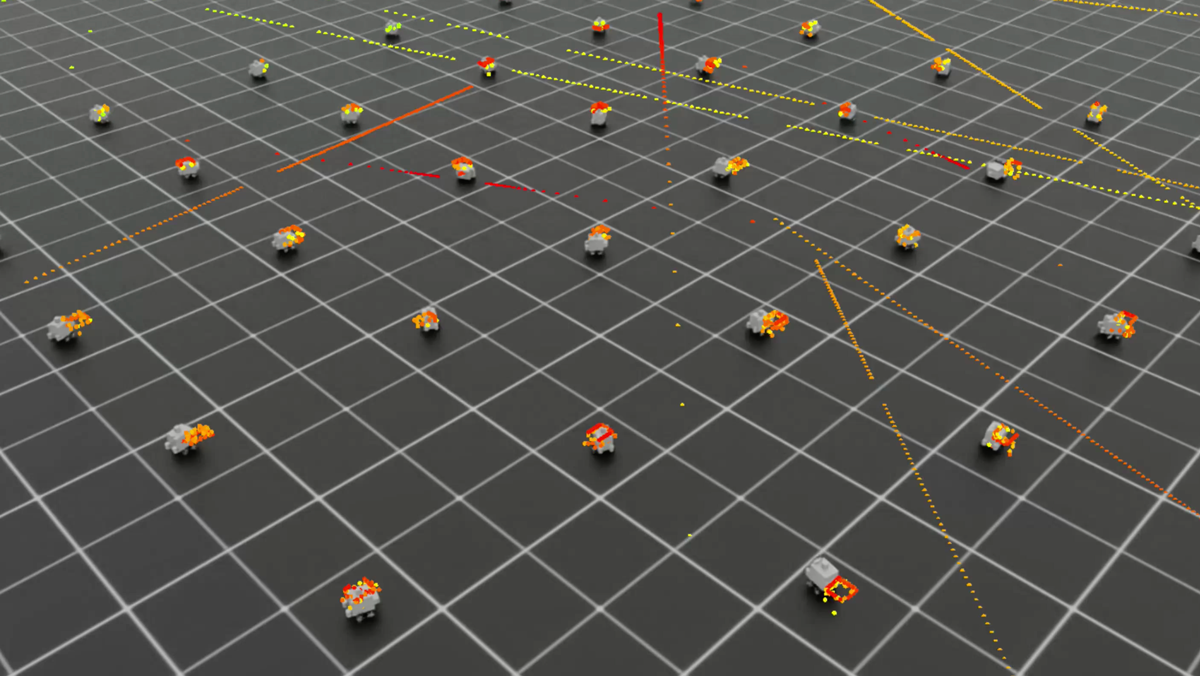
Using reinforcement learning in NVIDIA Isaac Lab to train a neural network policy for optimal mecanum wheel velocity control.
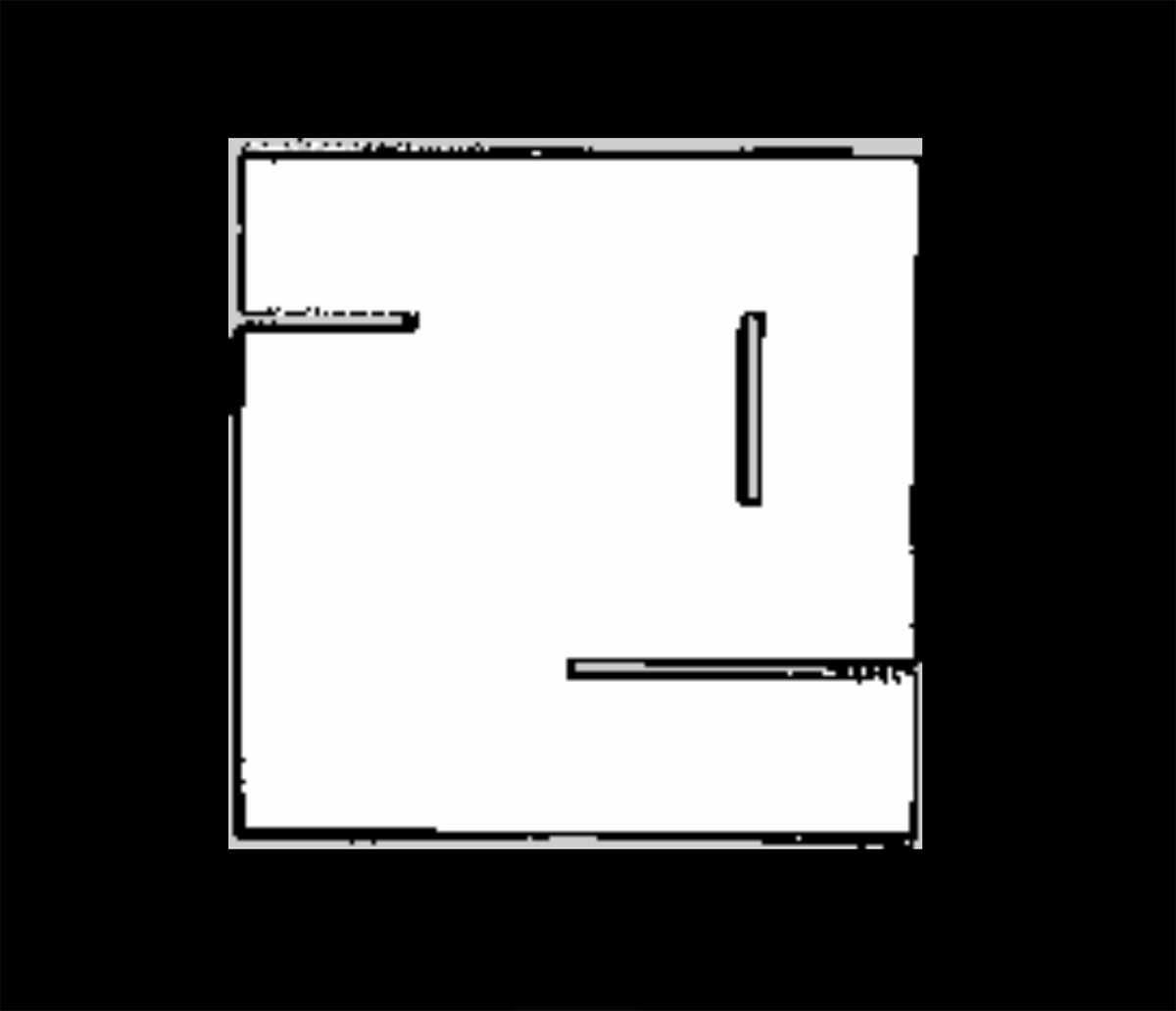
Using slam_toolbox to build occupancy grid maps for autonomous navigation on a mecanum drive robot.
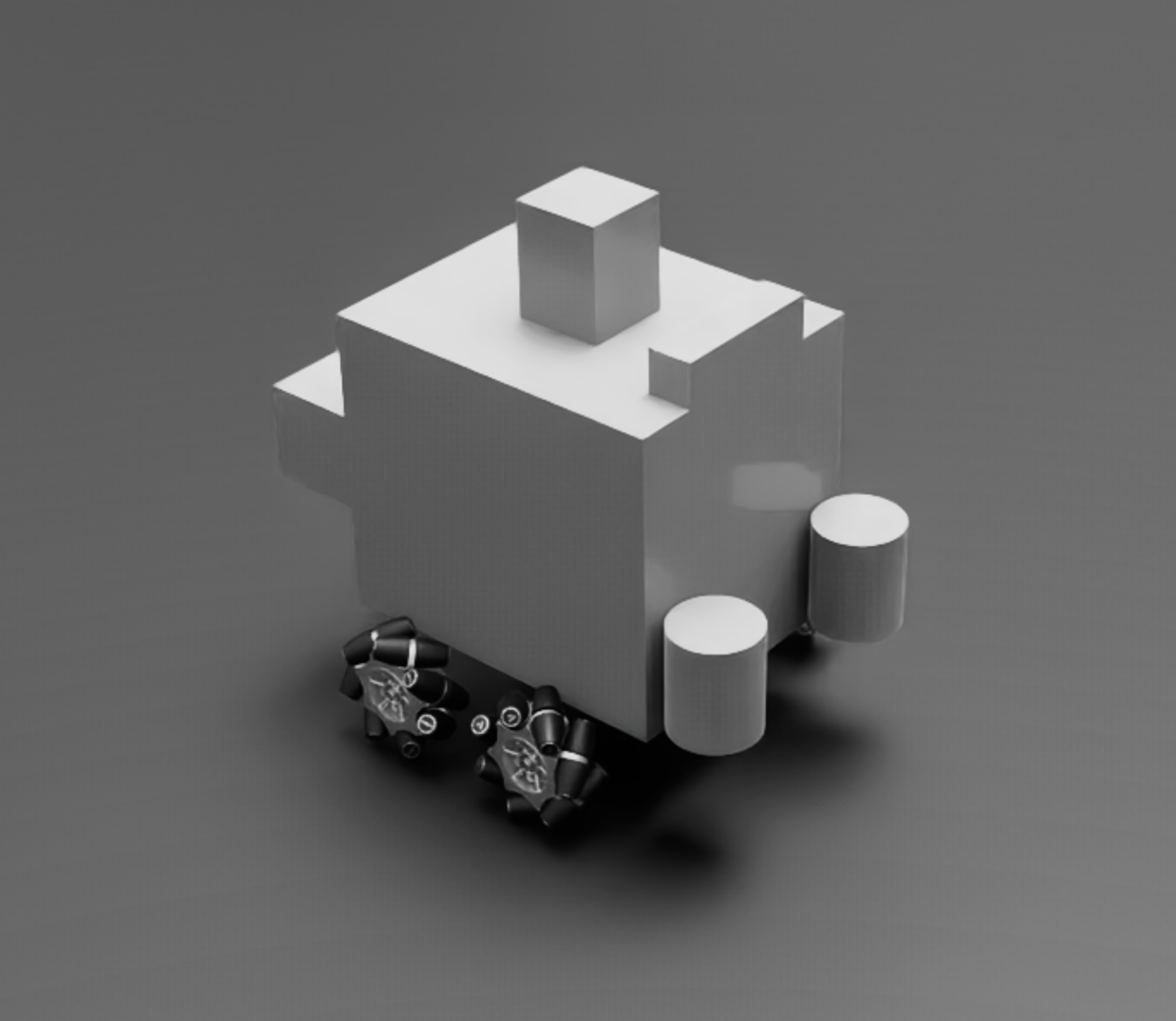
Creating an accurate digital twin of the mecanum drive robot in NVIDIA Isaac Sim for simulation-first development and testing.
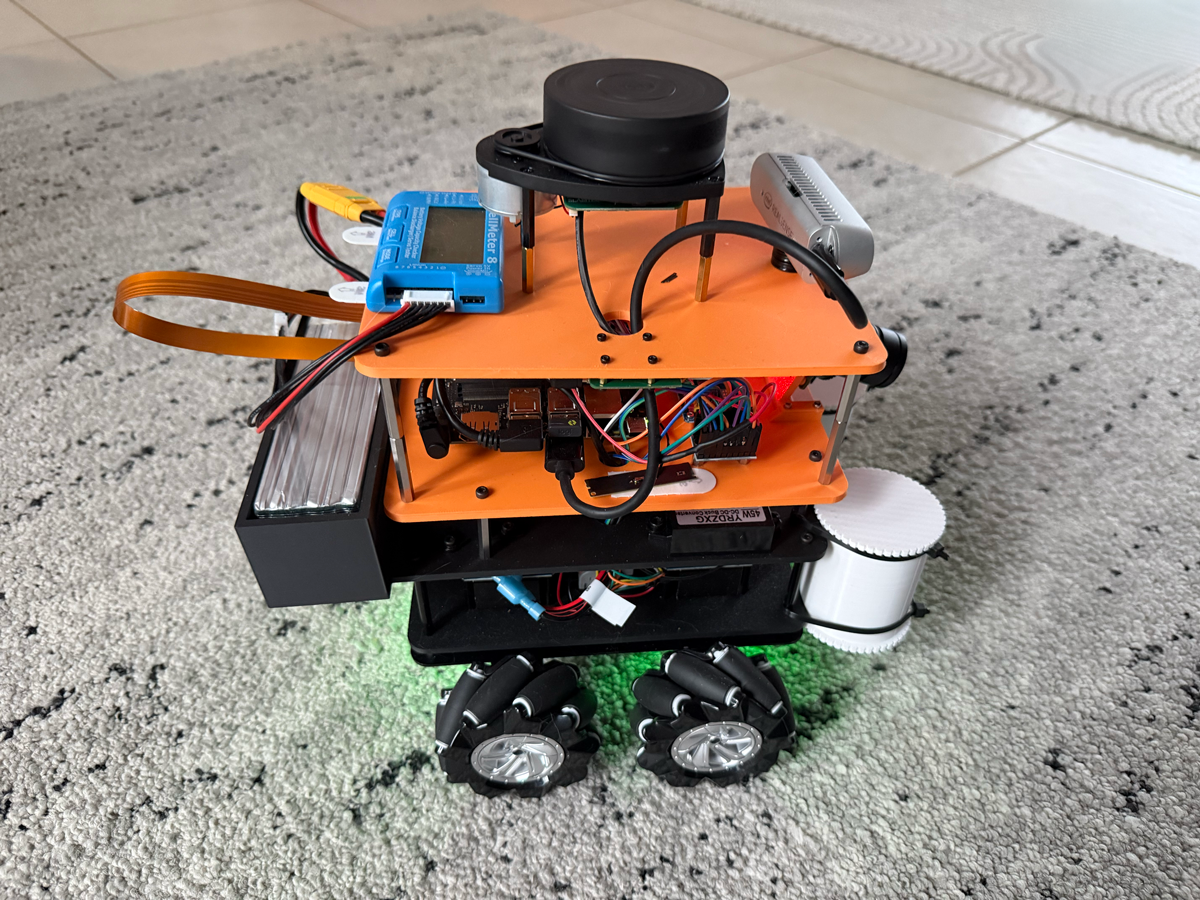
Building a 4-wheel mecanum drive robot from scratch with NVIDIA Jetson Orin Nano, RPLIDAR, and RealSense depth camera for autonomous navigation.
